Light : 液晶全息术赋能软体机器人光学交互“大脑”
导读
近日,陆延青/王瑜/马玲玲研究团队提出一种利用液晶计算全息术实现嵌入式光学指令处理与决策功能的光学交互软体机器人系统。该系统由全软物质模块化架构组成,主要基于液晶聚合物网络与丝素蛋白材料,构建了一个集成指令编码、数据加密、视觉显示与按需执行的闭环框架,能够精准指引操作者完成特定复杂任务。这种可以通过全息成像实现指令信息光学交互的聚合物薄膜器件,在本系统中发挥着类似生物体中枢神经系统的信息整合单元作用,从而为克服当前软体机器人系统的局限性提供了可行路径。作为概念验证,本研究展示了一种能够实现精确按需抓取的智能抓手,以及一个能够在集成全息指令引导下走出迷宫的行走机器人。相关研究成果以 “All-in-one optically interactive soft robots with embedded liquid crystal holography” 为题发表于国际顶尖光学期刊《Light: Science & Applications》。论文通讯作者为南京大学陆延青教授、王瑜教授和马玲玲特聘研究员,论文第一作者为南京大学博士生张子宸,魏阳博士和博士生王泽宇为共同一作。
研究背景
软体机器人技术已成为机器人领域中一项具有变革性的技术。软体机器人因其固有的多自由度控制能力,能够实现复杂的三维形变与多种运动模式,从而具备执行多样化复杂任务的潜力。然而,当前软体机器人系统在任务指令的生成与解读方面,仍普遍依赖于外部硬件控制架构或人类操作者的直接认知输入。机器人本体尚不具备信息存储与自主传输能力,因而无法反向向操作者提供精准的任务指引——即何种任务需要被执行,以及如何有效执行。这一局限性严重制约了软体机器人在复杂场景下的任务适应能力与操作可靠性。因此,开发具有嵌入式信息管理中心、具备主动引导操作者能力的全软体机器人架构,成为提升其交互性与自主性的关键路径。
研究亮点
为此,团队设计了一种光学交互软体机器人系统(OISRS),提出了以嵌有相位全息图的液晶聚合物薄膜作为信息整合中心,并结合液晶聚合物网络和丝素蛋白的功能特性实现了多自由度驱动和信息复用,构建了集光学存储、信息加密、显示反馈、按需执行于一体的多功能光学系统(图1)。核心创新包括:
1. 理念创新
本研究首次提出利用液晶聚合物全息术实现固态薄膜中嵌入式光学指令存储与处理。作为信息集成单元,其在OISRS中的功能类似于生物体的中枢神经系统,通过全息反馈动态协调操作者与机器人系统之间的光学信息交互,为解决目前软体机器人系统在信息存储与交互方面的局限性提供了概念上的创新。
2. 材料创新
液晶聚合物与丝素蛋白的结合实现了材料性能的互补。液晶聚合物虽然具有优异的光热响应性和全息编码能力,但其热塑性有限、驱动模式单一、且与功能掺杂物的相容性不足。而丝素蛋白薄膜凭借突出的形态可塑性、湿度驱动性能和高掺杂相容性,恰好弥补了这些局限。二者的结合由此构建了一个既能实现多自由度驱动、又可进行信息复用的多功能平台,实现了材料层面的创新。
3. 应用创新
作为OISRS概念的验证,本文展示了一种光学智能抓取系统。借助系统内置的全息指令引导,操作者可实现按需抓取与物体分类的高精度控制(图2)。进一步,本研究还演示了一种行走机器人,操作者通过解析多级加密的全息路径,成功引导其完成迷宫穿越任务(图3)。上述复杂任务的成功演示,为下一代光学智能交互软体机器人系统的发展提供了创新性的技术思路与设计路径。
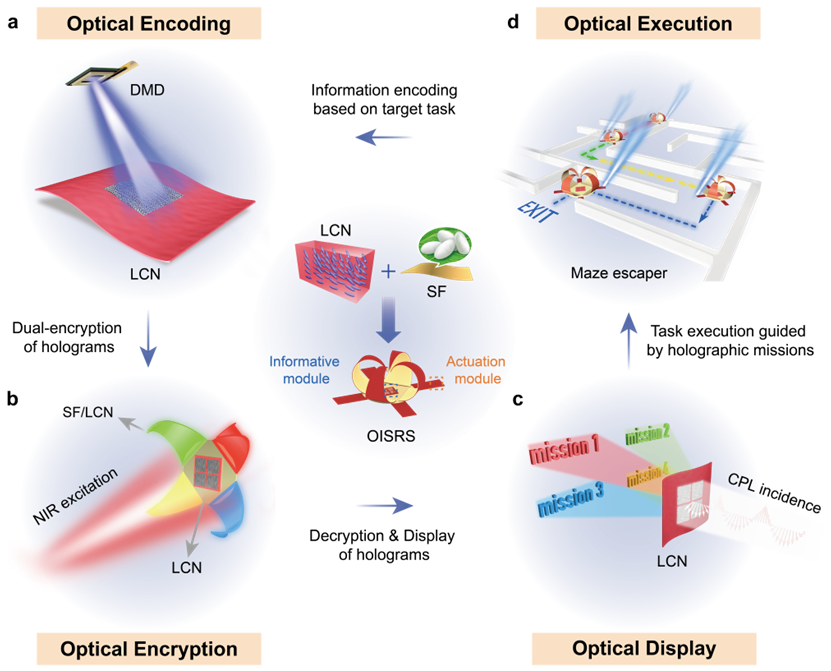 图1:集成信息编码、加密、显示与执行功能的光学交互软体机器人系统设计。液晶-丝素蛋白复合材料通过协同作用,将多自由度驱动与集成信息处理能力融为一体。
图1:集成信息编码、加密、显示与执行功能的光学交互软体机器人系统设计。液晶-丝素蛋白复合材料通过协同作用,将多自由度驱动与集成信息处理能力融为一体。
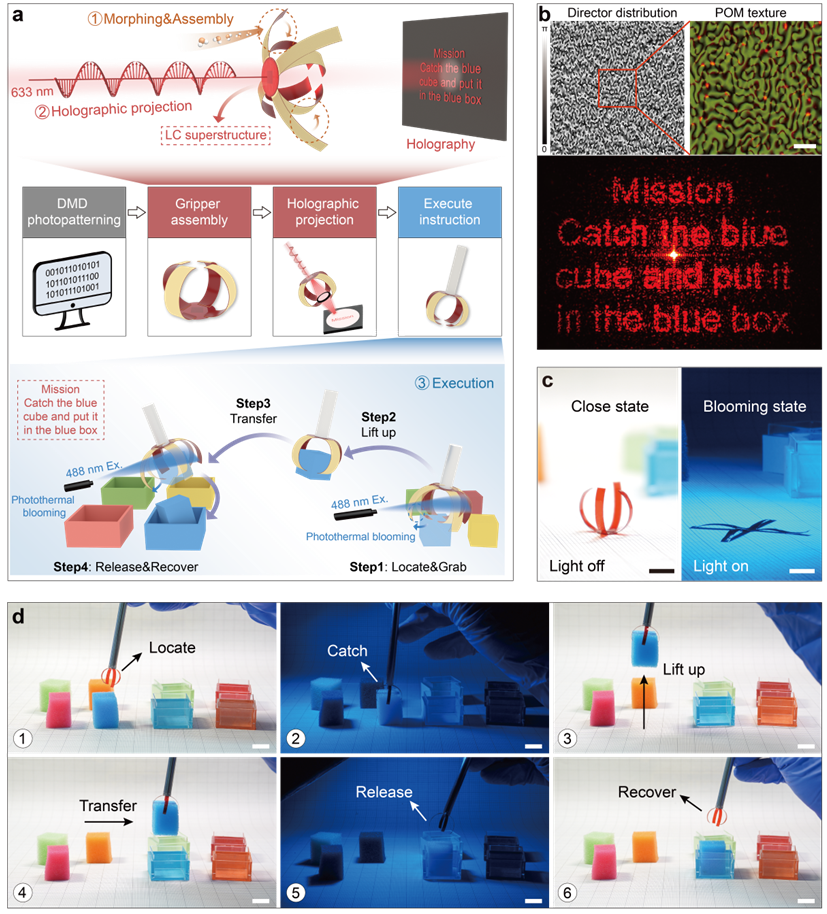 图2:用于物体分类的光学交互智能抓手。(a)通过全息反馈实现精准按需抓取与分类;(b) 对应设计任务的液晶指向矢分布、偏光显微镜织构及全息图像;(c) 无光照射时抓手处于闭合状态(左),光照下处于绽放状态(右);(d) 使用智能抓手完成定位、抓取、转移与释放的全过程。
图2:用于物体分类的光学交互智能抓手。(a)通过全息反馈实现精准按需抓取与分类;(b) 对应设计任务的液晶指向矢分布、偏光显微镜织构及全息图像;(c) 无光照射时抓手处于闭合状态(左),光照下处于绽放状态(右);(d) 使用智能抓手完成定位、抓取、转移与释放的全过程。
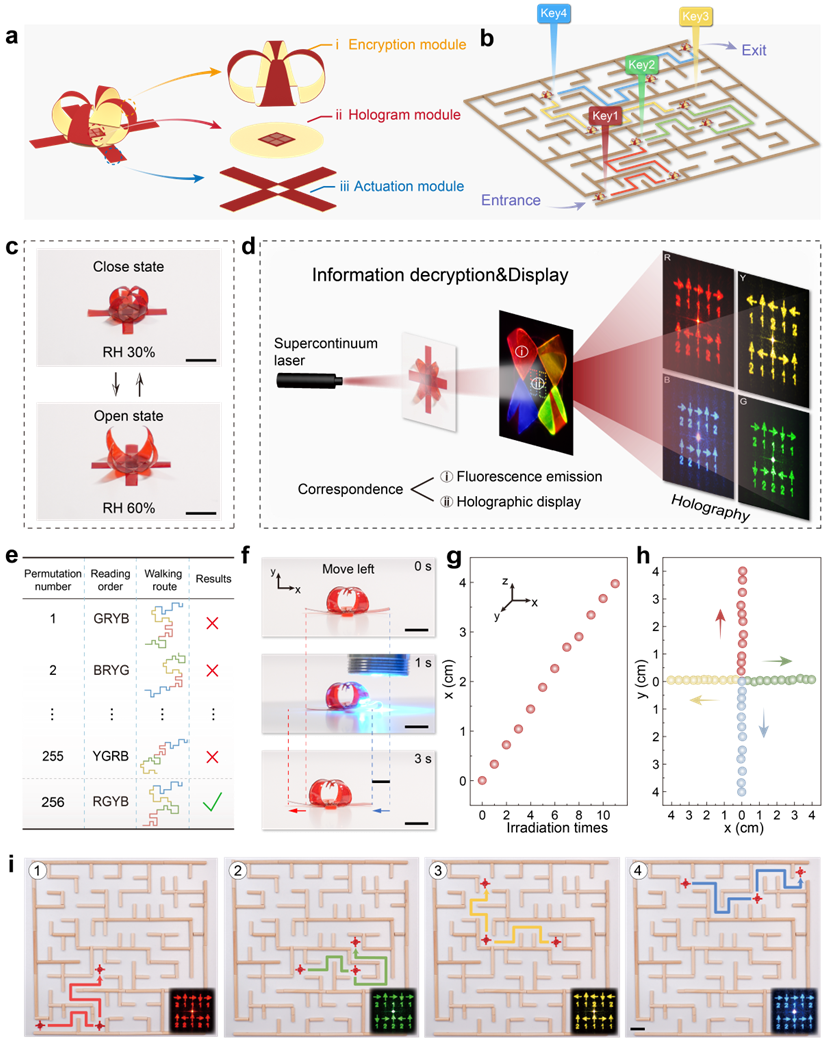 图3:用于迷宫逃脱的层级加密光学交互行走机器人。(a)分层设计示意图,包括加密模块、全息模块与驱动模块;(b) 依据四条解密指令信息完成迷宫逃脱过程示意图;(c) 湿度刺激下花朵结构从闭合到开放的状态转变;(d) 利用超连续激光提取四条全息指令;(e)不同读取顺序对应的行走轨迹与逃脱结果;(f) 由 488 nm 激光驱动的行走机器人运动过程;(g) 单条腿沿 x 轴方向的横向位移随激光照射次数的关系;(h) 激光持续开/关操作下四个移动方向对应的运动轨迹;(i)实现迷宫逃脱的实际照片。
图3:用于迷宫逃脱的层级加密光学交互行走机器人。(a)分层设计示意图,包括加密模块、全息模块与驱动模块;(b) 依据四条解密指令信息完成迷宫逃脱过程示意图;(c) 湿度刺激下花朵结构从闭合到开放的状态转变;(d) 利用超连续激光提取四条全息指令;(e)不同读取顺序对应的行走轨迹与逃脱结果;(f) 由 488 nm 激光驱动的行走机器人运动过程;(g) 单条腿沿 x 轴方向的横向位移随激光照射次数的关系;(h) 激光持续开/关操作下四个移动方向对应的运动轨迹;(i)实现迷宫逃脱的实际照片。
总结与展望
本研究通过将液晶计算全息技术引入软体驱动器,构建了一种新型光学交互软体机器人系统,成功实现了信息编码、数据加密、视觉显示与按需执行的多项功能在单一系统的高度集成。展望未来,液晶全息术将为软体机器人提供非电子化、高功能密度且安全的信息存储与处理能力,展现出显著的技术潜力。同时,利用可编程液晶聚合物与多功能生物聚合物材料固有的生物相容性,二者的有机结合为面向生物-技术交界领域的生物混合机器人系统开辟了新机遇。此外,随着液晶全息术向高分辨率、实时动态与多维控制方向不断发展,软体机器人的光学交互智能水平也将实现显著提升。总体而言,本研究将自适应机械性能与复杂光学信息处理相融合,为下一代全光学智能全软体机器人的发展提供了创新性思路。
论文信息
Zhang, ZC., Wei, Y., Wang, ZY. et al. All-in-one optically interactive soft robots with embedded liquid crystal holography. Light Sci Appl 15, 219 (2026).
https://doi.org/10.1038/s41377-026-02287-5
文章源于LightScienceApplications公众号